


提高Global Mapper中激光雷达数据的质量
Global Mapper的激光雷达模块作为软件的可选附件提供,提供了大量用于编辑、过滤和普遍提高点云数据质量的工具。更新后的点云随后可用于模块广泛的分析工具,或者可以导出以创建激光雷达数据的改进版本作为结尾交付物。
导入期间的过滤
任意将点云导入Global Mapper的人都会看到,加载数据的简单操作会触发一个对话框,其中有多种过滤选项可用于将加载的点云限制为更相关的子集。虽然这是一个在加载时进行过滤的方便实用程序,但在大多数情况下,需要对数据集的功能进行初步分析,以做出关于删除哪些点的明智决定。

激光雷达导入对话框提供了多种选项,用于在数据在地图视图中呈现之前过滤数据
访问元数据
在多种情况下,关键的分析是视觉分析。点云是否覆盖了感兴趣区域的范围?是否存在大的覆盖缺口?在3D Viewer中显示时,是否有明显的垂直异常?这种初步质量控制过程的一种更有条理的方法涉及审查层的元数据,该元数据可从控制中心访问。元数据揭示了有关图层的各种信息,包括高程范围、平均密度、点间距、覆盖区域、收集日期。
有了这些信息,现在就可以着手进行一系列数据改进程序,以解决点云中感知到的缺陷。
从广义上讲,改进点云数据的过程分为两类:编辑和过滤。编辑通常涉及更新单个点的功能,或者更有可能的是,更新选定的一组点,而过滤则推断删除不需要或被认为是错误的点。通常,这两个程序是串联应用的。
编辑点云数据
编辑点分类
应用与点云数据的常见编辑过程是应用或更新分类值以反映所表示的表面类型。激光雷达格式规范中可用的标准分类包括地面、建筑物、低、中、高植被、水以及多种其他分类。在一些点云中,尤其是那些通过摄影测量分析创建的点云中,全部的点开始都是未分类的,为了执行类型的系统分析,都需要应用相关的分类。
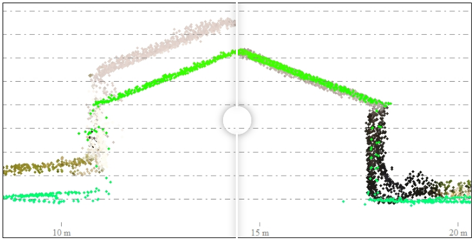
使用激光雷达模块,可以通过选择所需的点并使用工具栏中预配置的分类按钮之一应用更新的分类来手动更新点分类。虽然这种方法对于范围广泛的重分类项目可能被认为不切实际,但它对于便捷更新有限数量的选定点很有用,尤其是在路径轮廓或横截面视图中渲染这些点时。
代表在“路径剖面”显示中选定并手动重新分类的建筑物屋顶的点
自动分类
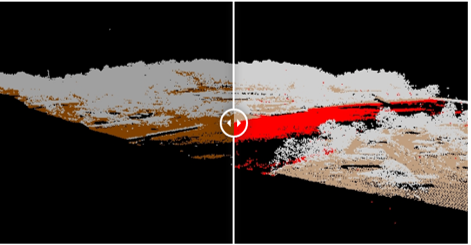
手动重分类的一种更有效的替代方法是使用模块的自动分类工具之一,该工具对点云进行几何分析,以识别和重分类某些类型的点。可以应用指定算法来检测代表地面或裸露土地、高植被或树木、建筑物、地上公用电缆和电线杆的点。这些重新分类的点随后可用于DTM创建或功能提取。
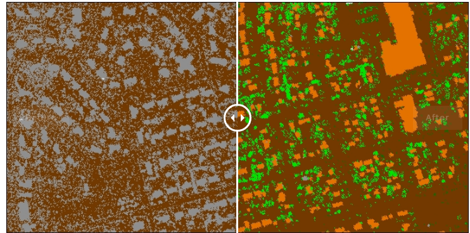
代表建筑物和树木的点被自动识别和重新分类
编辑X、Y和Z值
可以编辑或更新的点云的另一个功能是点的三维位置。通常,激光雷达文件不需要移动,但是摄影测量派生的点云更有可能需要进行位置调整。如果点云未与底层参考层或另一个点云准确对齐,激光雷达模块可提供多种工具来提高定位精度:
-
可以相对于X、Y和Z轴手动移动整个图层
-
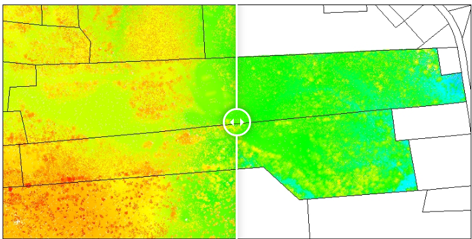
激光雷达QC工具调整高程值以匹配测量的地面控制点
-
拟合激光雷达工具重新定位点以匹配重叠点云的高程
-
Global Mapper的图像校正工具可用于将点云重新对齐到已知的3D地面控制点
在这些过程中的每一个中,分配给每个点的坐标和/或高程将被更新以反映偏移。
使用“拟合激光雷达”工具调整位置以与现有激光雷达图层对齐的摄影测量生成的点云
过滤点云数据
几乎无一例外,在开始分析、表面生成或特征提取工作流程之前,都需要过滤点云。过滤过程可以基于数据的地理范围,或者更常见的是基于其固有属性或功能。
地理过滤
与矢量数据一样,可以将点云裁剪到预多边形的范围内,提供一种简单的方法削减后续过程中的冗余。这可能是数据导入过程中可用的过滤选项中很有用的,但它也可以在数据加载后应用。
过滤或裁剪到项目区域范围内的激光雷达点云
点接近度也可以用作过滤的基础。激光雷达模块的细化工具根据定义的密度或间距要求移除点,同时保留邻近区域内具有min、max或平均高程的点。这在处理高密度、摄影测量创建的点云时很有用。
降噪
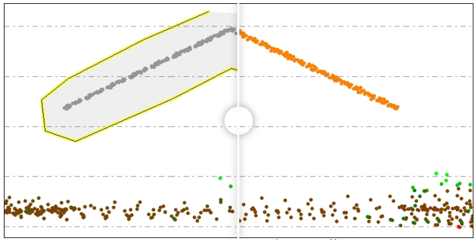
噪声点被定义为在指定局部区域内落在正常高程范围之外的那些点。由于数据收集过程的问题、目标区域的物理异常(例如在飞机下方飞翔的鸟类)或多种其他原因,可能或出现噪声点。激光雷达模块的噪声识别工具可以根据一组规定的参数和高程阈值重新分类噪声点,也可以立即移除或删除它们。
高于或低于预期局部高程阈值的噪声点重新分类并显示在3D视图中
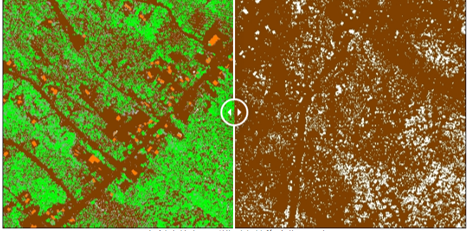
按分类过滤
将点云转换为栅格DTM过程开始一步是取消未被归类为地面的点。保留非地面或未分类的点将创建一个包含地上功能的表面,并且不会反映目标区域的裸地形态。在这种情况下,过滤是一个简单的类选择过程,它可以应用于点的屏幕显示,也可以应用于网格或表面创建过程。在一种情况下,分配给生成的栅格图层中像素的高程都将从点云的选定子集派生。
点云导出
虽然Global Mapper的Lidar Module提供了广泛的编辑和过滤工具,但需要注意的是,本文中描述的改进过程不会自动应用于原始文件或加载的图层。为了将点云改进程序的结果保存到文件中,要以适当的点云格式导出数据。新图层将继承全部修改后的点功能,并将显示在过滤或删除不需要的点后保留的那些点。

-
2025-11-28
年末科研大礼包-装备升级,即刻启航
即日起,面向高校、科研院所与企业科研团队,下单正版科研软件,满额即赠实用科研好物,助力科研工作!
查看详情 >
-
2023-12-06
Pipe Flow Expert 中文快速入门指南:精通管道设计与流体动力学
深入了解PipeFlowExpert中文快速入门指南,掌握管道设计和流体动力学的基础知识。本指南涵盖了绘图界面的使用技巧、单位转换(公制或英制)、储罐和流体源的应用,以及连接点或节点的设置。详细介绍流量需求的计算方法、管道流向的分析技巧,以及如何设计开放式和封闭式管道系统。学习如何有效预防管道回流,以及如何选择和使用管道图门、管件、控制阀和喷头。此外,本指南还提供泵型号的选择指导和负流量泵的使用方法,旨在帮助初学者和行业人员提高在管道系统设计和分析中的技能和效率。
查看详情 >
-
2023-09-06
REFPROP正版软件基本操作指南
这份REFPROP正版软件基本使用方法指南详细介绍了从启动软件到查询流体物性的步骤。您将了解如何选择流体、查询指定点的物性、查询饱和状态的物性以及创建物性图表。无论您是初学者还是专家,这个指南都将帮助您轻松掌握REFPROP软件的操作技巧。
查看详情 >

