


Global Mapper Pro中的点云分隔分析
随着Global Mapper Pro的发布,Blue Marble Geographics 继续开发程序中的点云分析工具。Global Mapper 点云处理工具的新添加之一是 Segmentation by Spectral Graph Partitioning 工具,用于根据用户输入参数识别点的不一样的段。这种新功能属于自动分类的范畴,可用于半自动分类,但不是直接将类应用于分析点,而是将细分识别值应用于每个已识别的返回聚类。
什么是点云分隔?
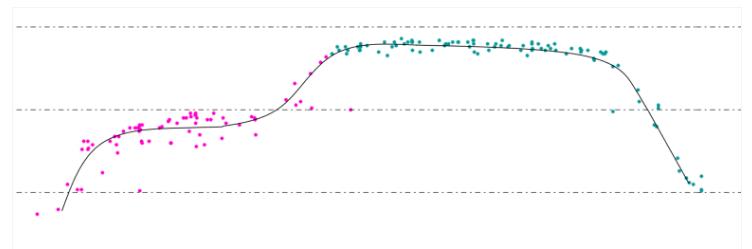
Global Mapper Pro中的分隔工具使用点对点相似性度量来识别和标记不一样的点簇。分析中使用的每个点返回的特征取决于可用的点属性和用户输入参数。根据点之间的相似性,此工具然后将点分解为离散段。
属性评估
作为分割分析的一步,进行属性评估以确定点对点的相似性。要自定义分析的这一部分,用户可以选择并加权将在过程中考虑的属性值。
位置
在此分析中始终考虑点返回的坐标位置。考虑位置确保识别的点段将是连续的,代表单个特征或聚集在一起的特征。在不考虑位置的情况下,散布在整个点云中的相似点可以放置在同一段中,从而无法提供有意义的特征识别。
法线
点法线是垂直与该点所代表的表面的方向。为了形象化这个概念,考虑一个小的邻域点和他们代表的表面,然后,在一个点的位置,把这个点想象成一条从创建的表面突出的垂直线。在相似性分析中考虑点法线值有助于识别平面。如果您要识别道路平面或地表,子啊属性估计中更多地使用点法线值可能会产生更好的效果。

强度
强度是在手机激光雷达数据时返回传感器的激光脉冲强度。返回的强度受反射激光脉冲的表面的影响。点云的强度值可以在Global Mapper Pro中使用Color Lidar by Intensity绘制模式进行可视化。在分割分析中开率强度有助于创建更可能有相同或相似材料构成的点集群。
返回编号
当激光脉冲被发送并返回到激光雷达传感器时,脉冲可以多分裂和反弹,从而产生多次返回。此信息与保存为返回编号属性的数据一起收集。地面或建筑物等固体表面更有可能由单回波组成,而书目的结构允许脉冲从树枝和树叶上反弹,从而产生多次回波。与强度一样,返回编号可以在Global Mapper Pro中使用激光雷达绘图模式选项进行可视化。
曲率
曲率是指由点的局部邻域创建的曲线,类似于点法线值如何考虑由点创建的形状。在属性评估中包括曲率考虑了形状的一致性。
虽然并非全部这些属性都适用于全部点云,例如照片派生点云通常没有返回数字或强度,但分隔分析设置允许用户选择和加权应考虑的特征。
分割
在分析点相似性后,Global Mapper Pro 会根据确定的相似性和用户输入的分区值将点分成簇或段。一些分割参数是无单位的,并且比 Global Mapper 用户可能熟悉的值更抽象。
段中的minimum点数
minimum点数值设置允许的,minimum段的大小(以点为单位)。设置此参数时,请考虑点云的密度和您要识别的特征,以估计代表给定特征的点数。
Maximum标准差数
统计分析中的一种常用度量,标准差度量值与平均值的分布。设置分割的maximum标准偏差数会缩小要考虑的点关联范围。较大数量的标准差会创建包含更多弱连接点的线段,而较小数量的标准差会创建包含更紧密连接点的线段。
Maximum 曲率
Maximum 曲率设置单个线段内允许的曲率量。如果超过此值,该段将被拆分为多个段。
代表汽车的点被分成两部分,它们之间的中断发生在曲线的地方。更高的曲率阈值可能会有所帮助
如何使用分段分析?
Global Mapper 中的点云分割分析是一个通用的工具。由于执行此工具后不会对点应用分类,因此它允许您识别没有明确类别的特征和/或在通过分割识别特征后对特征进行分类。
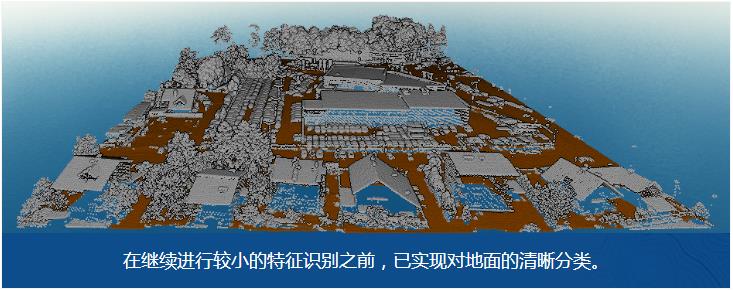
识别地面
由于可以考虑更多属性,因此使用分割来识别地面点可以超越自动分类工具。为了识别该点云中的地面,使用了分割工具,并考虑了位置、强度和曲率值。运行 Segmentation 工具后,对话框将保持打开状态,激光雷达绘制模式将自动更改为按 Segment ID 绘制激光雷达。此过程将通过新创建和应用的段 ID 值显示点云。

使用考虑几个点属性的设置并创建多个点的线段,150 个或更多,高度连接,低连接阈值,识别地面和大型平屋顶的线段。
要将已识别的点段分类为地面,可以使用选择激光雷达段工具选择这些点。通过单击段内的任意点选择一个地面段,然后按住 Control 键盘键以允许选择第二个段。选择地面代表点后,可以手动将它们归类为地面。
识别汽车
现在大部分点已被识别并归类为地面,可以过滤这些点,并将重点放在数据集中的较小特征上。在这个特定的点云中,有一个停车场,可以使用 Global Mapper 中的 Segmentation 工具来识别汽车特征。
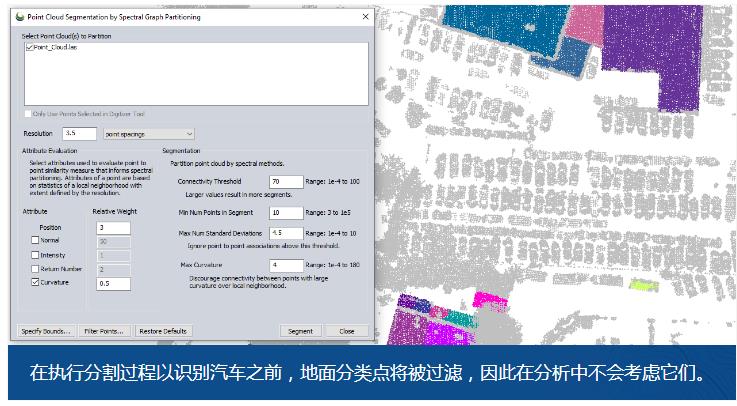
在分割对话框中使用过滤激光雷达数据工具或过滤点意味着在分割分析中将只考虑未分类的点。考虑点位置和曲率,收紧连接阈值,并改变别的参数会导致识别出代表该点云中汽车的段。
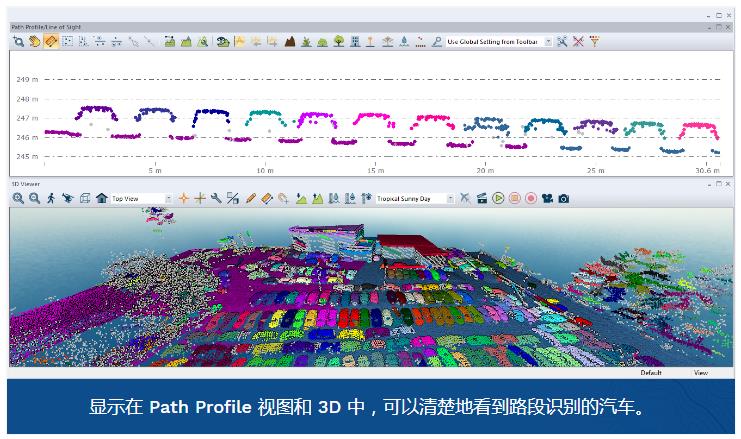
识别出代表汽车的点后,可以使用“选择分段”工具选择它们以进行分类或删除。
Global Mapper 中的点云分割工具提供了自定义特征识别的机会,以便在处理点云时对它们进行分类或删除。结合Select Segment工具,segmentation大大扩展了程序的分类能力和人工分类的效率。

-
2026-03-26
Origin 2026 SR1 服务更新包发布
Origin 2026 服务更新包1现已发布,适用于更新现有Origin或OriginPro 2026 SR0安装或全新安装。本次更新修正了智能填充、Excel公式、分组绘图批量操作及合并图形兼容性等多处问题,并解决了部分崩溃错误。安装后版本号将升级到10.3.0.197,用户可通过“帮助:关于Origin”确认更新完成。
查看详情 >
-
2026-04-13
GMS 10.9 中文版正式发布 — 新增 PFAS 运移模拟与地下水能量(GWE)模块
GMS 10.9 中文版现已发布。本次更新新增 MODFLOW-USG Transport 对 PFAS 运移模拟的支持、MODFLOW 6 地下水能量(GWE)模型、UGrid 多项改进以及 MODFLOW 6 界面优化等功能,为地下水数值模拟与地热储能分析提供更多工具支持。
查看详情 >
-
2026-03-10
GTAP数据库 V12已正式发布 - 附视频介绍
GTAP(Global Trade Analysis Project)是一个设立在美国普渡大学农业经济系的经济研究组织。该项目成立于1992年,旨在为贸易政策分析和可计算一般均衡(CGE)建模提供数据支持。全新版GTAP V12已于2026年2月正式发布,欢迎联系北京睿驰科技订购正版GTAP数据库。
查看详情 >

