


Global Mapper Pro 23.1 的新功能
Global Mapper Pro 23.1推出了一系列的新工具和增强功能!Pro版包含 Global Mapper 标准版中的更新和新功能,增加了无人机数据处理、地形和激光雷达编辑以及工作流优化工具的功能。23.1 版中的新功能包括创建 3D 网格缓冲区、从点云数据生成轮廓、更新分割工具等等!
3D 网格缓冲区功能
3D 网格球形、圆柱形和管道缓冲区的创建现在可以在 Global Mapper Pro 中的体积特征创建的数字化仪选项下使用。与创建 2D 矢量缓冲区类似,此工具基于选定的矢量特征。可以从选定的点、线和面要素生成圆柱形缓冲区,而球体和管道体积缓冲区适用于点或线。
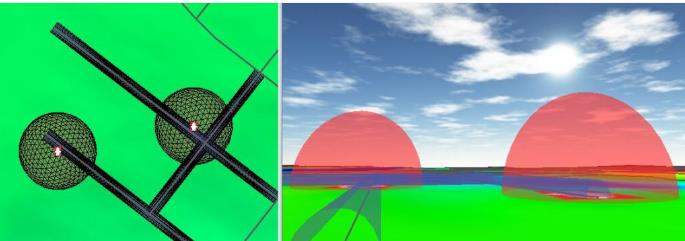
这些道路区域和消火栓覆盖区域如何相互作用的线周围的管道缓冲区和点周围的球体缓冲区。
网格缓冲区的创建允许明确识别和探索特定矢量对象周围的 3D 区域。作为网格特征,Global Mapper Pro 中的 2D 主视图从空中视角显示了网格的结构,但真正的魔力发生在 3D 查看器中,当可以从倾斜角度查看特征时。
激光雷达的轮廓生成
虽然不是 Global Mapper 程序中的新功能,但轮廓生成在 Pro 版 23.1 版本中得到了增强,以支持直接从激光雷达或点云数据创建轮廓线。借助这项新功能,可以绕过从点云手动生成网格化地形图层的中间步骤,以简化工作流程。
在 Global Mapper Pro 23.1 中打开轮廓生成工具时,现在可以识别点云图层,并可将其用作创建轮廓线的源数据。从点云生成轮廓时,其他点云分析工具中提供的高级过滤选项允许从选定的点子集导出轮廓。在后台,Global Mapper Pro 根据轮廓生成选项中注明的应用点过滤和分辨率自动创建高程模型,并使用此表面创建一层轮廓线。
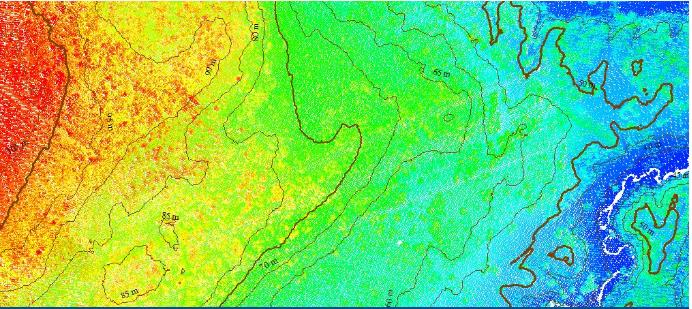
应用点分类过滤器后,可以从点云生成等高线
通过频谱图分区更新分割
Global Mapper Pro 中的分割工具用于识别点云中相似的相邻返回,以找到不同的特征。这简化了手动分类工作流程,并通过自动化流程识别相似点的集群。虽然这不是 Global Mapper Pro 23.1 中的新功能,但它已通过将点返回的 RGB 颜色视为识别过程的一部分的选项以及过滤或合并识别段的新选项进行了改进。
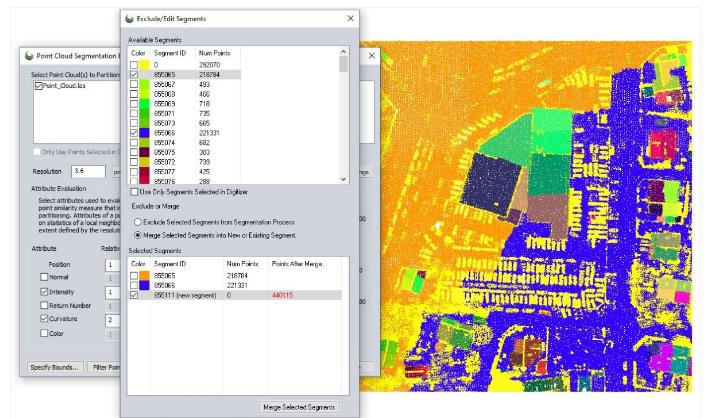
使用分割工具来识别地面,将两个大的线段合并为一个线段,然后可以在再次使用该工具来识别较小的要素时排除该线段。
分段工具设置中的新分段 ID 设置选项可用于重命名单个分段、将选定分段合并为一个分段或从后续分析中排除特定分段。从分割工具的下一次执行迭代中排除片段的选项使用户更简单识别大片段,例如地面或建筑物屋顶,并从旨在识别较小对象的后续分析中排除这些片段。
Global Mapper Pro 23.1 继续推进高级 3D 数据创建和分析工具的开发。无论您是使用激光雷达数据、复杂地形表面、矢量特征,还是使用 Python 简化工作流程,Global Mapper Pro 都可以提供帮助。

-
2025-11-28
年末科研大礼包-装备升级,即刻启航
即日起,面向高校、科研院所与企业科研团队,下单正版科研软件,满额即赠实用科研好物,助力科研工作!
查看详情 >
-
2023-12-06
Pipe Flow Expert 中文快速入门指南:精通管道设计与流体动力学
深入了解PipeFlowExpert中文快速入门指南,掌握管道设计和流体动力学的基础知识。本指南涵盖了绘图界面的使用技巧、单位转换(公制或英制)、储罐和流体源的应用,以及连接点或节点的设置。详细介绍流量需求的计算方法、管道流向的分析技巧,以及如何设计开放式和封闭式管道系统。学习如何有效预防管道回流,以及如何选择和使用管道图门、管件、控制阀和喷头。此外,本指南还提供泵型号的选择指导和负流量泵的使用方法,旨在帮助初学者和行业人员提高在管道系统设计和分析中的技能和效率。
查看详情 >
-
2023-09-06
REFPROP正版软件基本操作指南
这份REFPROP正版软件基本使用方法指南详细介绍了从启动软件到查询流体物性的步骤。您将了解如何选择流体、查询指定点的物性、查询饱和状态的物性以及创建物性图表。无论您是初学者还是专家,这个指南都将帮助您轻松掌握REFPROP软件的操作技巧。
查看详情 >

